案例研究:为巴西国家石油公司设计的船体检测机器人



项目说明:
巴西国家石油公司(Petrobras)发起了一项挑战,旨在减少在需要高空作业或在密闭空间作业 的难以进入地区开展检查活动的风险,提高其活动的效率、灵活性和运营安全性 。
预期解决方案:
能够对难以进入开放区域(高空作业、风力、温度等)的管道、设备和结构进行远程检查的系统,在目视检查和厚度测量活动中取代脚手架的搭建和攀爬人员的工作,该系统基于配备自身有效载荷的遥控或自主机器人平台(无人机、爬行器等),以进行目视检查、厚度测量和裂缝检测。这些机器人平台(无人机、 爬行器等)配有自己的有效载荷,可进行目视检查、厚度测量和裂缝探测,能够在 陆上和海上环境的开放空间作业,也可在密闭空间作业。
解决方案解决方案已实施:
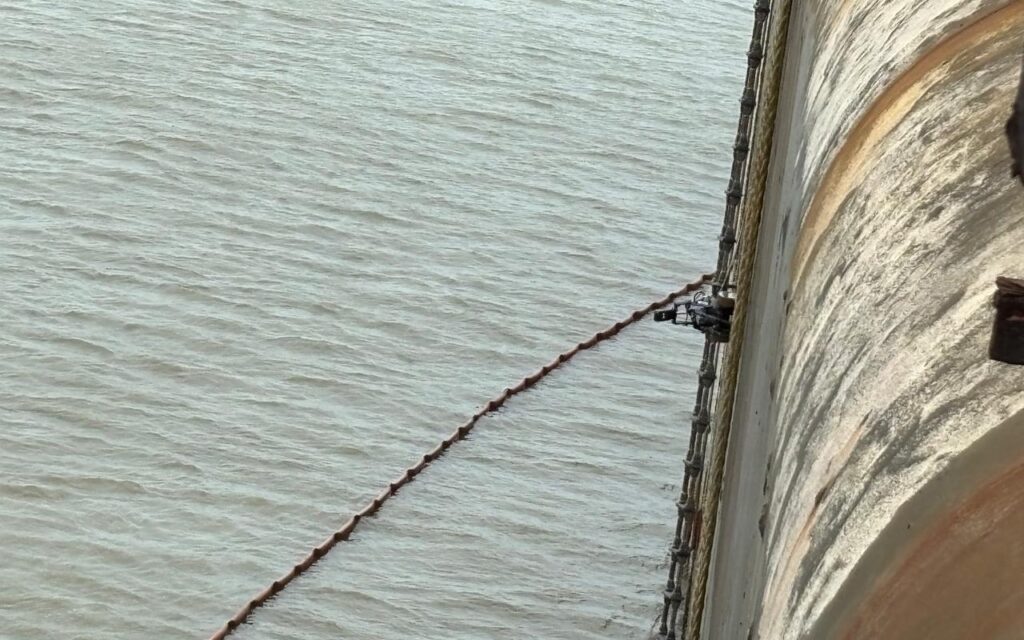
水下检测机器人:使用相同的底座和控制器,能够处理最多样化的情况。它有一个磁性耦合器,能够执行各种检查和清洁操作,是一种高度便携、电池驱动、易于移动的多功能车辆,是海上和陆上场景的必备物品。
巴西国家石油公司受益:
| 饼干 | 时间 | 描述 |
|---|---|---|
| 熟知法律信息-检查箱-分析学 | 11个月 | 这个cookie是由GDPR Cookie Consent插件设置的。该cookie用于存储用户对 "分析 "类cookie的同意。 |
| 熟知的法律信息-检查箱-功能 | 11个月 | 该cookie是由GDPR的cookie同意书设置的,以记录用户对 "功能 "类cookie的同意。 |
| 法律信息-检查箱-必要的 | 11个月 | 这个cookie是由GDPR Cookie Consent插件设置的。该cookies用于存储用户对 "必要 "类别的cookies的同意。 |
| 熟知的法律信息-检查箱-其他 | 11个月 | 这个cookie是由GDPR Cookie Consent插件设置的。该cookie用于存储用户对 "其他 "类别的cookie的同意。 |
| 熟知的法律信息-检查箱-性能 | 11个月 | 这个cookie是由GDPR Cookie Consent插件设置的。该cookie用于存储用户对 "性能 "类cookie的同意。 |
| 查看的cookie_policy | 11个月 | 该cookie由GDPR Cookie Consent插件设置,用于存储用户是否同意使用cookie。它不存储任何个人数据。 |